Azure Kinect with Open3D¶
Azure Kinect is only officially supported on Windows and Ubuntu 18.04.
Installation¶
Install the Azure Kinect SDK¶
Follow the guide to install the Azure Kinect SDK (K4A).
On Ubuntu, you’ll need to set up a udev rule to use the Kinect camera without
sudo, follow
this instruction.
After installation, you may run k4aviewer from the Linux terminal or
k4aviewer.exe on Windows to make sure that the device is working.
Currently, Open3D supports the Azure Kinect SDK version v1.2.0, though future
versions might also be compatible.
If you’re using Ubuntu 16.04, the Azure Kinect SDK is not officially supported. We have an unofficial workaround, see Unofficial Ubuntu 16.04 workaround for details.
Using Open3D from Pip or Conda¶
If you’re using Open3D installed via Pip or Conda, Open3D Azure Kinect features shall work out-of-the box if K4A is installed in the system in the recommended way. Open3D will try to load the K4A dynamic library automatically at runtime, when a K4A related feature within Open3D is used.
On Ubuntu, the default search path follows the Linux convention.
On Windows, Open3D will try to load the shared library from the default
installation path. For example, for K4A v1.2.0, the default path is
C:\Program Files\Azure Kinect SDK v1.2.0. If this doesn’t work, copy
depthengine_x_x.dll, k4a.dll and k4arecord.dll to where Open3D
Python module is installed if you’re using Open3D with Python, or to the same
directory as your C++ executable.
You can get Open3D’s Python module path by:
python -c "import open3d as o3d; import os; print(os.path.dirname(o3d.__file__))"
Compile from Source¶
To build Open3D from source with K4A support, set BUILD_AZURE_KINECT=ON at
CMake config step. That is
cmake -DBUILD_AZURE_KINECT=ON -DOTHER_FLAGS ..
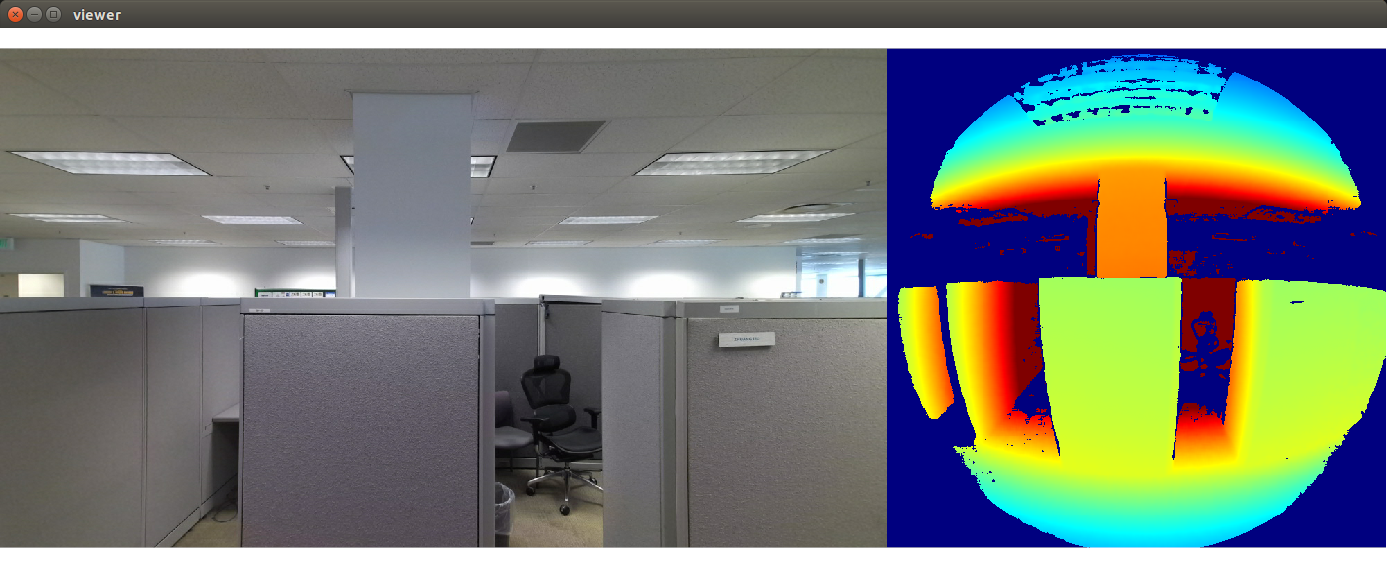
Open3D Azure Kinect Viewer¶
Open3D Azure Kinect Viewer is used for previewing RGB and depth image stream captured by the Azure Kinect sensor.
Open3D provides Python and C++ example code of Azure Kinect viewer. Please
see examples/Cpp/AzureKinectViewer.cpp and
examples/Python/ReconstructionSystem/sensors/azure_kinect_viewer.py
for details.
We’ll use the Python version as an example.
python examples/Python/ReconstructionSystem/sensors/azure_kinect_viewer.py --align_depth_to_color
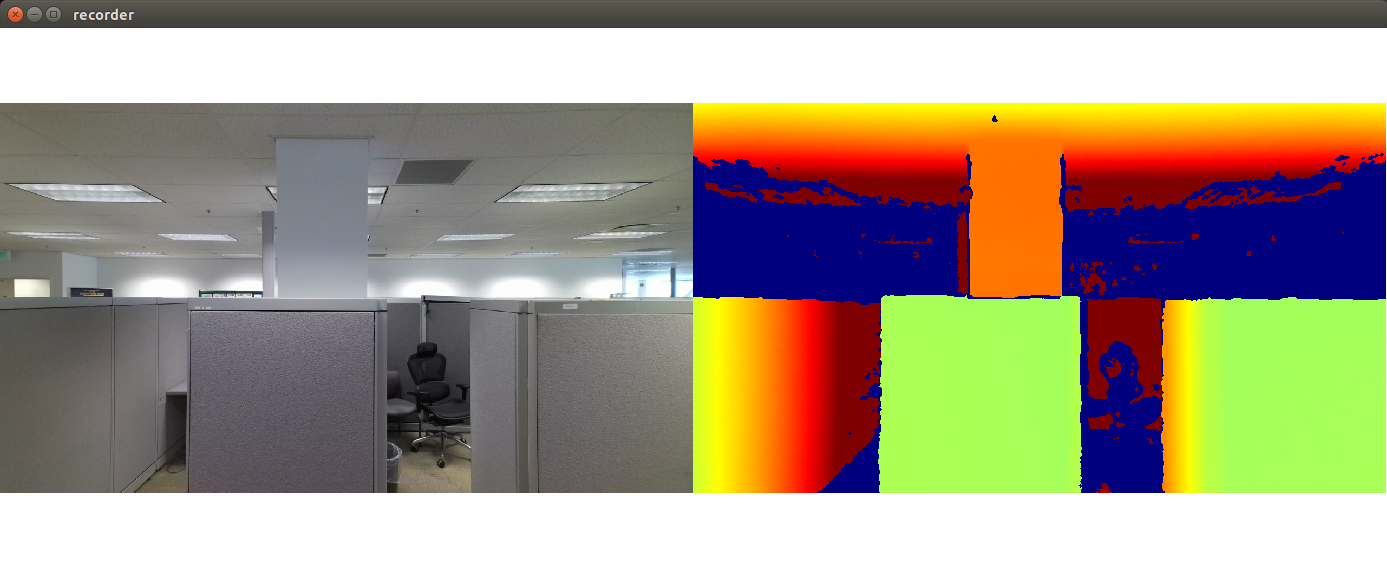
When recording at a higher resolution at a high framerate, sometimes it is helpful to use the raw depth image without transformation to reduce computation.
python examples/Python/ReconstructionSystem/sensors/azure_kinect_viewer.py
When the visualizer window is active, press ESC to quit the viewer.
You may also specify the sensor config with a json file.
python examples/Python/ReconstructionSystem/sensors/azure_kinect_viewer.py --config config.json
An sensor config will look like the following. For the full list of available configs, refer to here.
{
"camera_fps" : "K4A_FRAMES_PER_SECOND_30",
"color_format" : "K4A_IMAGE_FORMAT_COLOR_MJPG",
"color_resolution" : "K4A_COLOR_RESOLUTION_720P",
"depth_delay_off_color_usec" : "0",
"depth_mode" : "K4A_DEPTH_MODE_WFOV_2X2BINNED",
"disable_streaming_indicator" : "false",
"subordinate_delay_off_master_usec" : "0",
"synchronized_images_only" : "false",
"wired_sync_mode" : "K4A_WIRED_SYNC_MODE_STANDALONE"
}
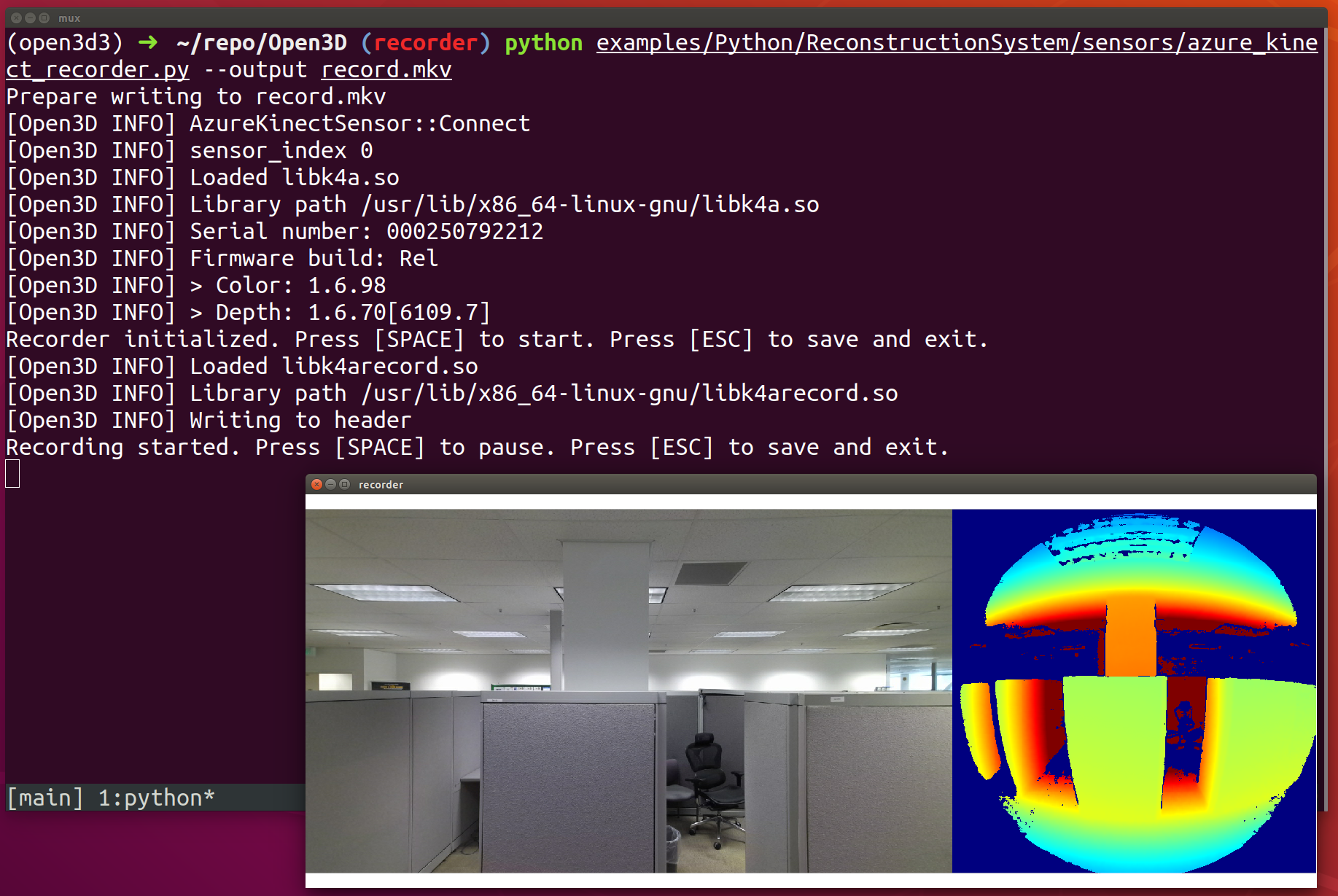
Open3D Azure Kinect Recorder¶
Open3D Azure Kinect Viewer is used for recording RGB and depth image stream to a MKV file.
Open3D provides Python and C++ example code of Azure Kinect viewer. Please
see examples/Cpp/AzureKinectRecord.cpp and
examples/Python/ReconstructionSystem/sensors/azure_kinect_recorder.py
for details.
We’ll use the Python version as an example.
python examples/Python/ReconstructionSystem/sensors/azure_kinect_recorder.py --output record.mkv
You may optionally specify the camera config when running the recorder script.
When the visualizer window is active, press SPACE start or pause the
recording, press ESC to quit the recorder.
Open3D Azure Kinect MKV Reader¶
The recorded MKV file uses K4A’s custom format which contains both RGB and depth information. Regular video player may only support playing back the color channel or not supporting the format at all. To view the customized MKV file, use the Open3D Azure Kinect MKV Reader.
Open3D provides Python and C++ example code of Open3D Azure Kinect MKV Reader.
Please see examples/Cpp/AzureKinectMKVReader.cpp and
examples/Python/ReconstructionSystem/sensors/azure_kinect_mkv_reader.py
for details.
python examples/Python/ReconstructionSystem/sensors/azure_kinect_mkv_reader.py --input record.mkv
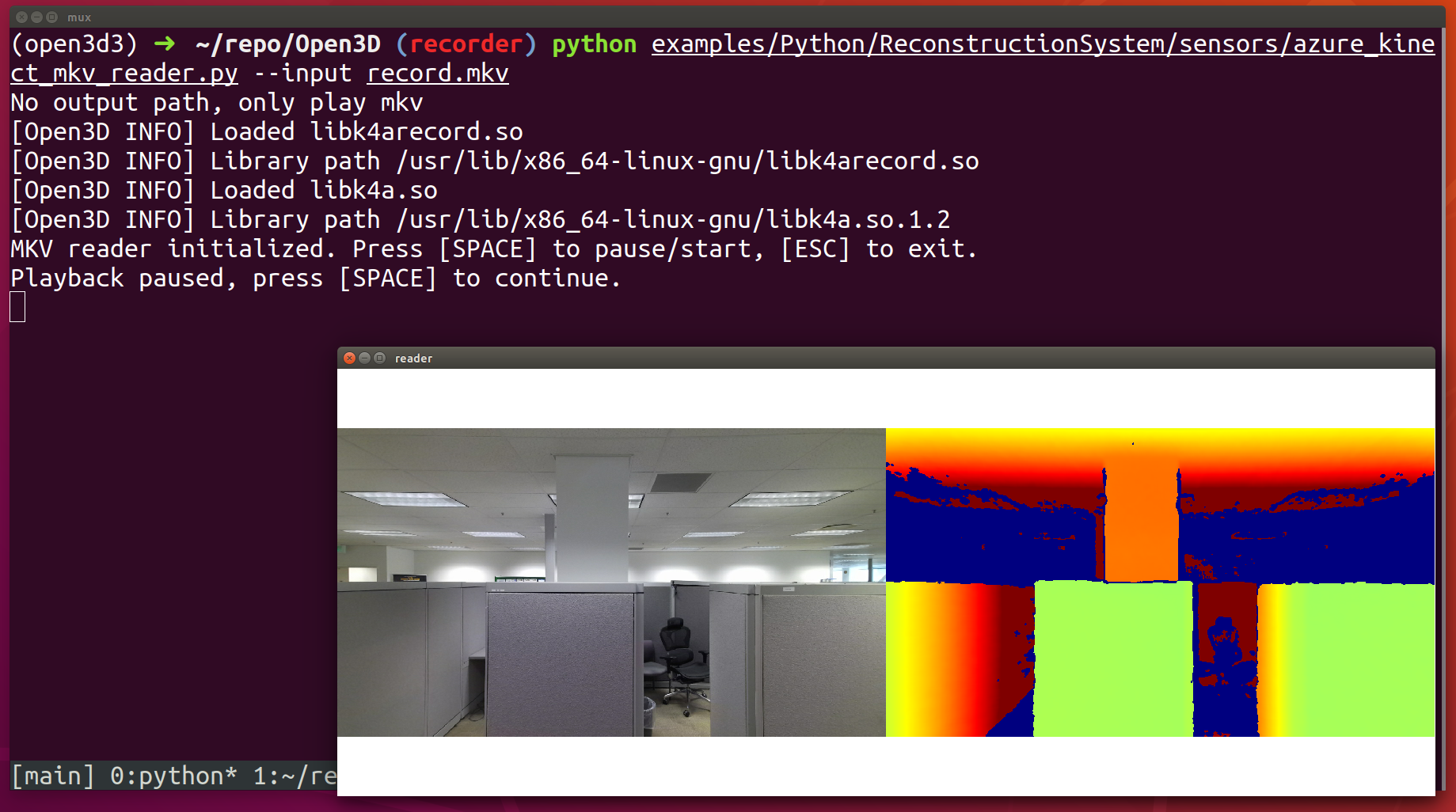
Note that even though the recorder records the unaligned raw depth image, the reader can correctly wrap the depth image to align with the color image.
To convert the MKV video to color and depth image frames, specify the --output
flag.
python examples/Python/ReconstructionSystem/sensors/azure_kinect_mkv_reader.py --input record.mkv --output frames

Unofficial Ubuntu 16.04 workaround¶
The Azure Kinect SDK is not officially supported on Ubuntu 16.04. We provide unofficial support for experimental purposes.
Using Open3D Python packages¶
For Python Open3D, run
pip install open3d_azure_kinect_ubuntu1604_fix
The open3d_azure_kinect_ubuntu1604_fix package contains 4 shared libs:
libstdc++.so: copied from ubuntu 18.04, needed bylibdepthengine.solibdepthengine.so: copied from K4A installation on ubuntu 18.04libk4a.so: build from source on ubuntu 16.04libk4arecord.so: build from source on ubuntu 16.04
The open3d_azure_kinect_ubuntu1604_fix will preload the shared libs and set
LD_LIBRARY_PATH which are then used by dlopen when the Kinect library
is loaded from the compiled module.
After installing open3d_azure_kinect_ubuntu1604_fix, import Open3D as usual
with import open3d, Open3D will try to load the shared libraries at
initialization time in __init__.py.
Compiling Open3D from source¶
First, install open3d_azure_kinect_ubuntu1604_fix package in your Python
environment. This package contains the headers that are required for compiling
Open3D with Azure Kinect support.
When building Open3D from source, set the flag -DBUILD_AZURE_KINECT=ON
at CMake configure time. CMake will then try to detect the location of the
open3d_azure_kinect_ubuntu1604_fix package using the Python executable
available from the current PATH. Therefore, when running CMake, make sure
that the same Python environment where open3d_azure_kinect_ubuntu1604_fix
was installed is activated.
If you build a C++ binary, you’ll still need to ensure that
LD_LIBRARY_PATH contains the directory which contains libstdc++.so and
libdepthengine.so at runtime. If you build the compiled Open3D Python
module, Open3D’s __init__.py will try to import
open3d_azure_kinect_ubuntu1604_fix to append the LD_LIBRARY_PATH
automatically.