Robust kernels¶
This tutorial demonstrates the use of robust kernels in the context of outlier rejection. For this particular tutorial, we will be using the ICP (Iterative Closest Point) registration algorithm as the target problem where we want to deal with outliers. Even so, the theory applies to any given optimization problem and not just for ICP. For the moment the robust kernels have been only implemented for the PointToPlane ICP.
The notation and some of the kernels implemented in Open3D has been inspired by the publication “Analysis of Robust Functions for Registration Algorithms” [Babin2019]
Note:
This tutorial and the original implementation of the robust kernels in Open3D was contributed by Ignacio Vizzo and Cyrill Stachniss from the University of Bonn.
Input Data¶
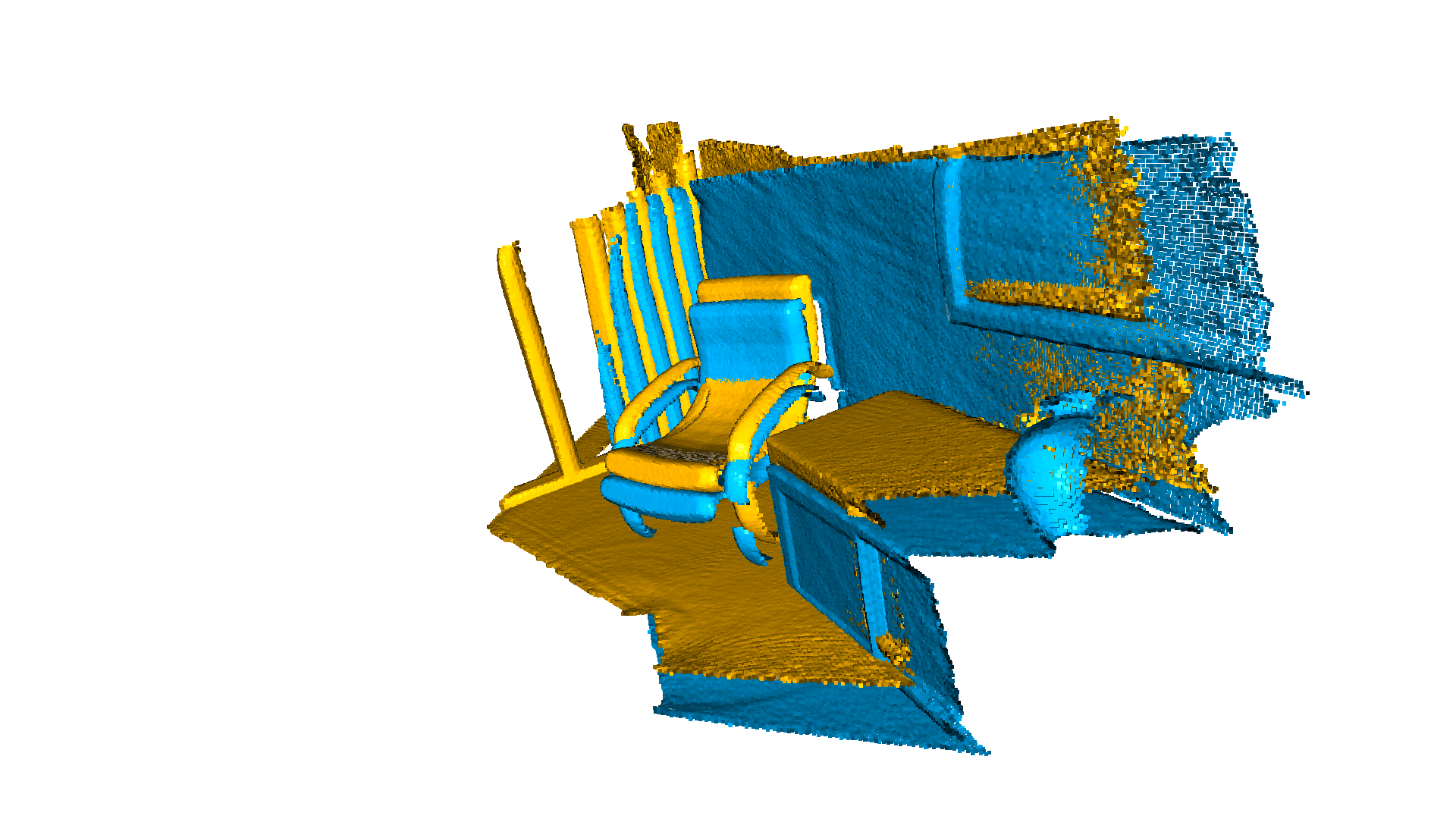
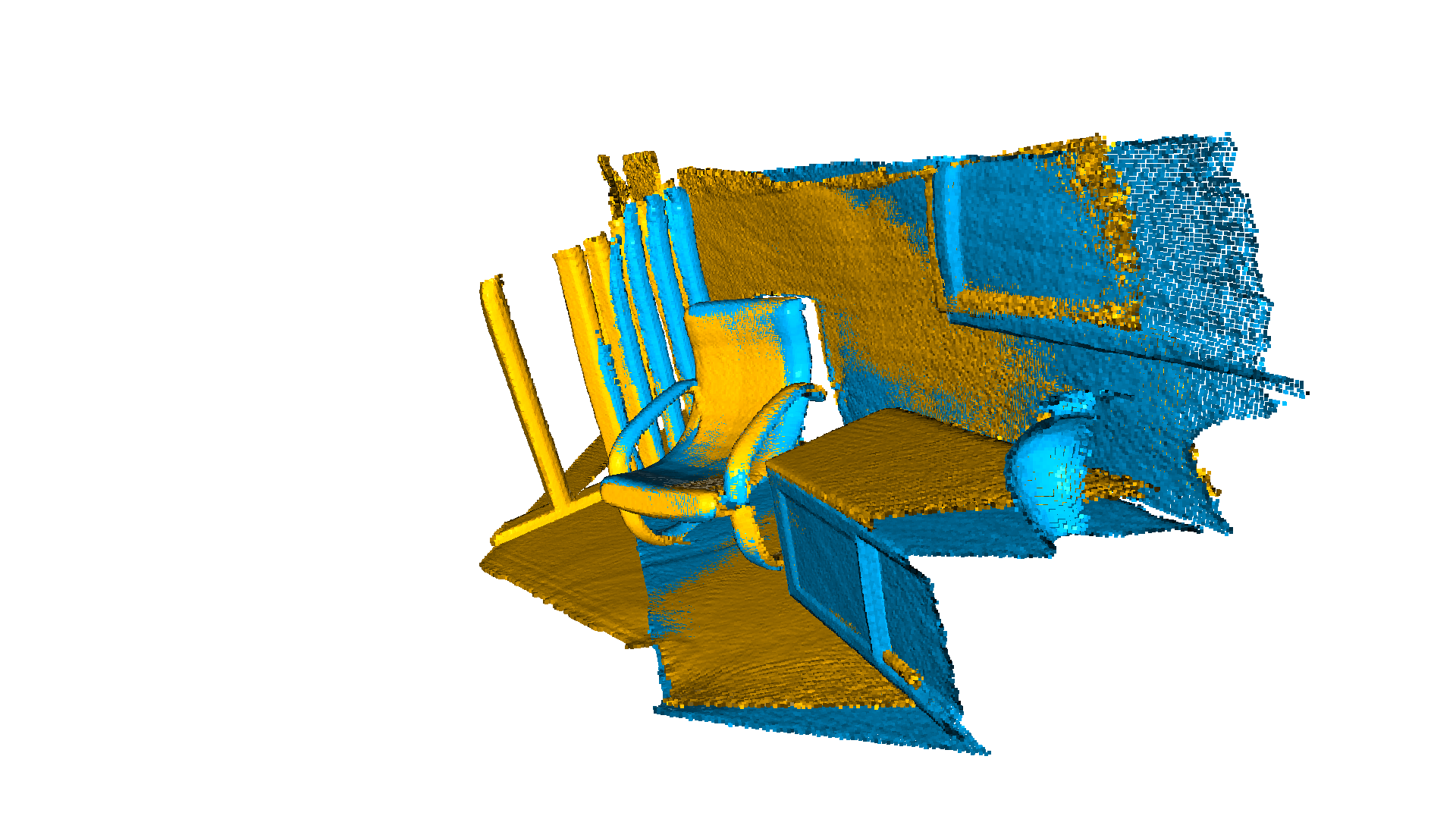
The code below reads a source point cloud and a target point cloud from two files. A rough transformation is given.
Note:
The initial alignment is usually obtained by a global registration algorithm. See Global registration for examples.
[2]:
def draw_registration_result(source, target, transformation):
source_temp = copy.deepcopy(source)
target_temp = copy.deepcopy(target)
source_temp.paint_uniform_color([1, 0.706, 0])
target_temp.paint_uniform_color([0, 0.651, 0.929])
source_temp.transform(transformation)
o3d.visualization.draw_geometries([source_temp, target_temp],
zoom=0.4459,
front=[0.9288, -0.2951, -0.2242],
lookat=[1.6784, 2.0612, 1.4451],
up=[-0.3402, -0.9189, -0.1996])
[3]:
source = o3d.io.read_point_cloud("../../test_data/ICP/cloud_bin_0.pcd")
target = o3d.io.read_point_cloud("../../test_data/ICP/cloud_bin_1.pcd")
trans_init = np.asarray([[0.862, 0.011, -0.507, 0.5],
[-0.139, 0.967, -0.215, 0.7],
[0.487, 0.255, 0.835, -1.4], [0.0, 0.0, 0.0, 1.0]])
draw_registration_result(source, target, trans_init)
Point-to-plane ICP using Robust Kernels¶
The standard point-to-plane ICP algorithm [ChenAndMedioni1992] minimizes this objective function:
where np is the normal of point p and K is the correspondence set between the target point cloud P, and source point cloud Q.
If we call ri(T) is ith the residual, for a given pair of correspondences (p,q)∈K we can rewrite the objective function as.
The optimization problem above can also be solved by using the iteratively reweighted least-squares (IRLS) approach, which solves a sequence of weighted least squares problems:
Outlier Rejection with Robust Kernels¶
The main idea of a robust loss is to downweight large residuals that are assumed to be caused from outliers such that their influence on the solution is reduced. This is achieved by optimizing E(T) as:
where ρ(r) is also called the robust loss or kernel.
We can see that exists a relation between the optimization formulation in IRLS and the one that uses the robust loss function. By setting the weight wi=1ri(T)ρ′(ri(T)), we can solve the robust loss optimization problem using the existing techniques for weighted least-squares. Therefore, we can minimize the objective function using Gauss-Newton and determine increments by iteratively solving:
where W∈RN×N is a diagonal matrix containing weights wi for each residual ri
How to use Robust Kernels in Open3D¶
registration_icp can be called with a parameter TransformationEstimationPointToPlane(loss). Where loss is a given loss function(also called robust kernel).
Internally, TransormationEstimationPointToPlane(loss) implements a function to compute the weighted residuals and Jacobian matrices of the point-to-plane ICP objective according to the provided robust kernel.
Note:
For more details on the ICP algorithm please see ICP Registration.
Vanilla ICP vs Robust ICP¶
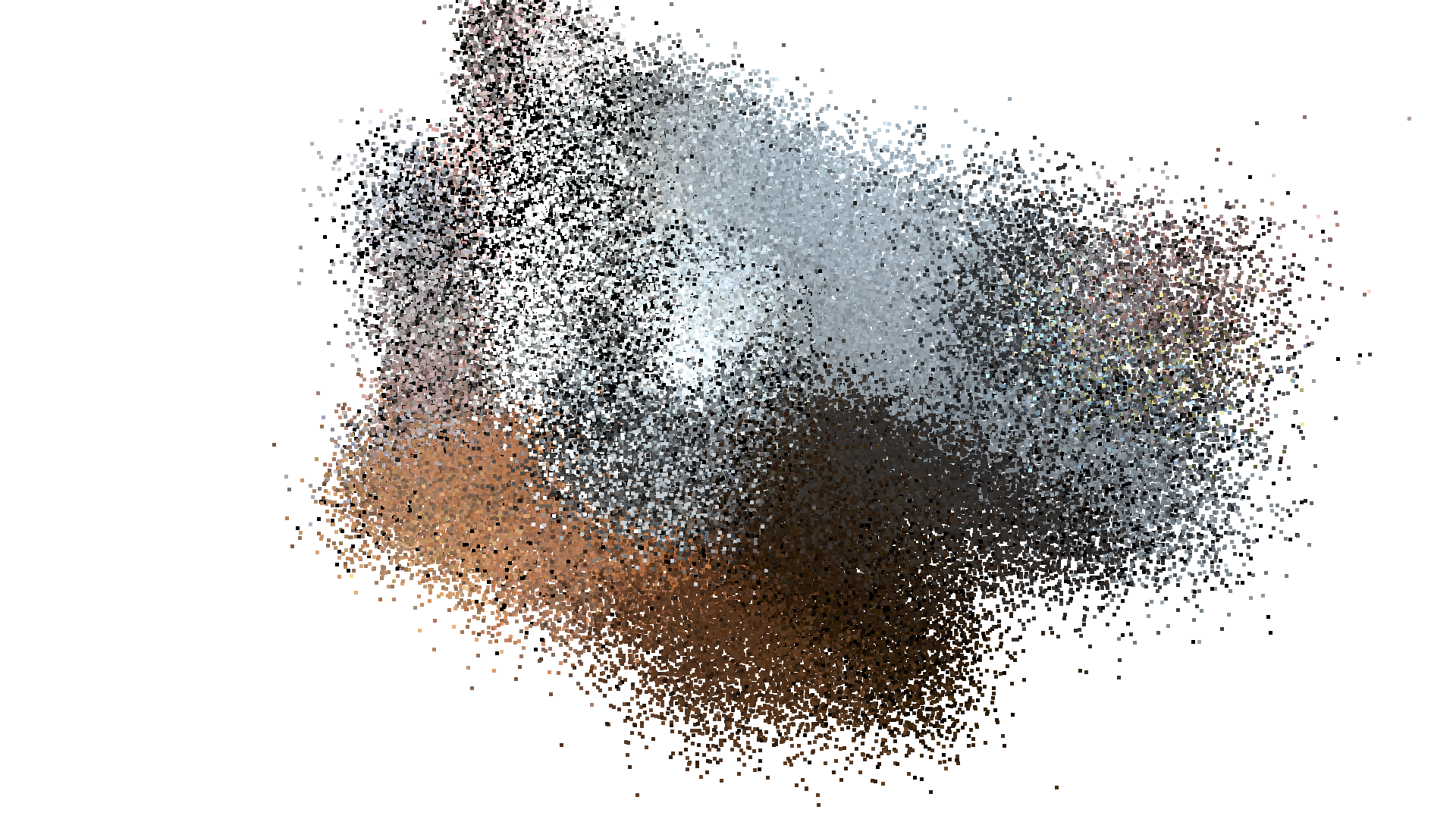
To better show the advantages of using robust kernels in the registration, we add some artificially generated gaussian noise to the source point cloud.
[4]:
def apply_noise(pcd, mu, sigma):
noisy_pcd = copy.deepcopy(pcd)
points = np.asarray(noisy_pcd.points)
points += np.random.normal(mu, sigma, size=points.shape)
noisy_pcd.points = o3d.utility.Vector3dVector(points)
return noisy_pcd
mu, sigma = 0, 0.1 # mean and standard deviation
source_noisy = apply_noise(source, mu, sigma)
print("Source PointCloud + noise:")
o3d.visualization.draw_geometries([source_noisy],
zoom=0.4459,
front=[0.353, -0.469, -0.809],
lookat=[2.343, 2.217, 1.809],
up=[-0.097, -0.879, 0.467])
Source PointCloud + noise:
Vanilla ICP¶
We inspect how the results will look if we use the exact same parameters that were used in the ICP Registration Tutorial.
[5]:
threshold = 0.02
print("Vanilla point-to-plane ICP, threshold={}:".format(threshold))
p2l = o3d.pipelines.registration.TransformationEstimationPointToPlane()
reg_p2l = o3d.pipelines.registration.registration_icp(source_noisy, target,
threshold, trans_init,
p2l)
print(reg_p2l)
print("Transformation is:")
print(reg_p2l.transformation)
draw_registration_result(source, target, reg_p2l.transformation)
Vanilla point-to-plane ICP, threshold=0.02:
RegistrationResult with fitness=9.768401e-02, inlier_rmse=1.194683e-02, and correspondence_set size of 19423
Access transformation to get result.
Transformation is:
[[ 0.85823808 0.0166381 -0.51319622 0.49841901]
[-0.1498723 0.96447065 -0.21905212 0.75689663]
[ 0.49040768 0.26411085 0.83014746 -1.42243213]
[ 0. 0. 0. 1. ]]
Tuning Vanilla ICP¶
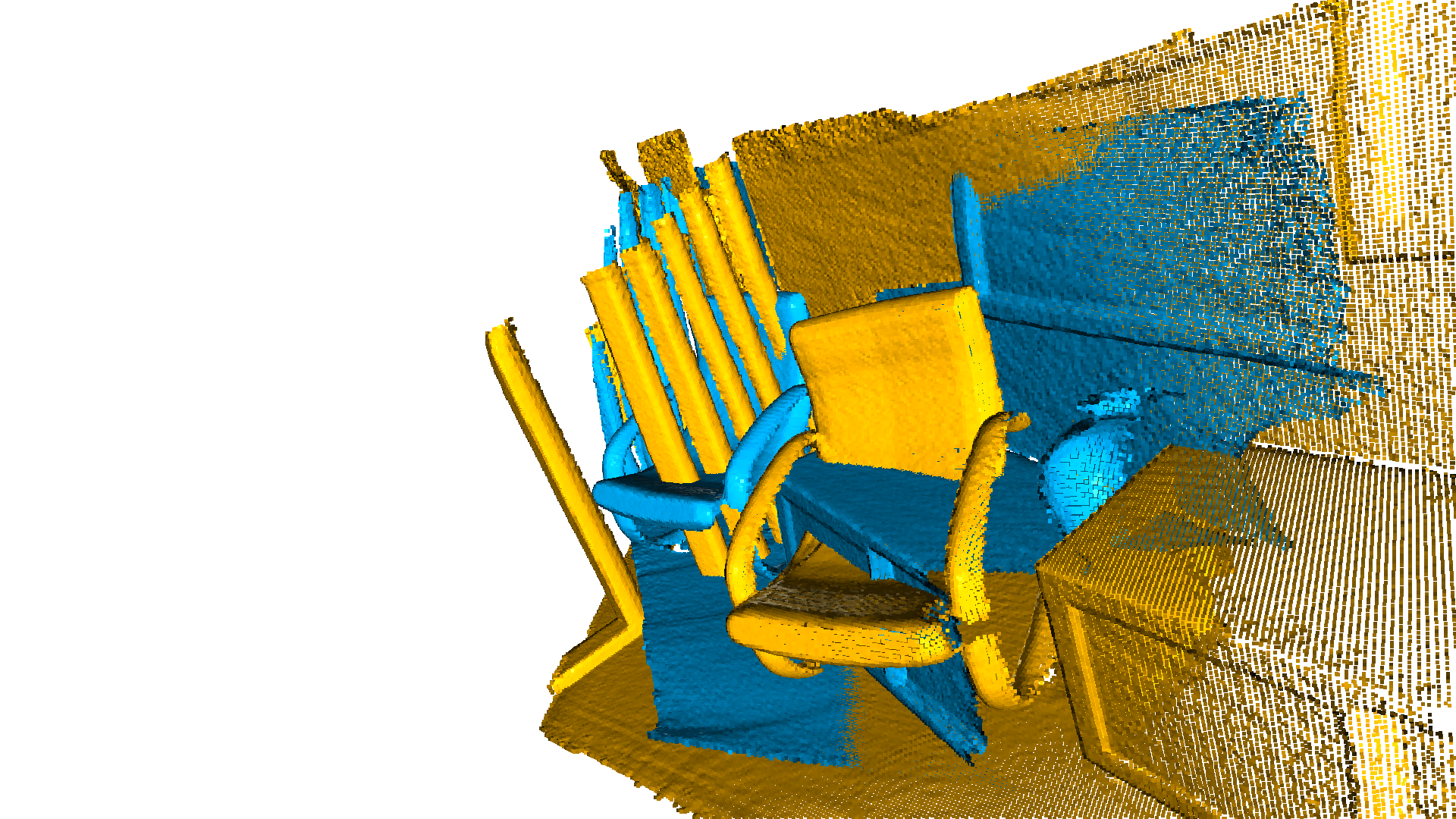
Given the fact that we are now dealing with gaussian noise, we might try to increase the threshold to search for nearest neighbors with the aim of improving the registration result.
We can see that under these condtions and without a robust kernel, the traditional ICP has no chance to deal with outliers.
[6]:
threshold = 1.0
print("Vanilla point-to-plane ICP, threshold={}:".format(threshold))
p2l = o3d.pipelines.registration.TransformationEstimationPointToPlane()
reg_p2l = o3d.pipelines.registration.registration_icp(source_noisy, target,
threshold, trans_init,
p2l)
print(reg_p2l)
print("Transformation is:")
print(reg_p2l.transformation)
draw_registration_result(source, target, reg_p2l.transformation)
Vanilla point-to-plane ICP, threshold=1.0:
RegistrationResult with fitness=1.000000e+00, inlier_rmse=2.422914e-01, and correspondence_set size of 198835
Access transformation to get result.
Transformation is:
[[ 0.79434487 0.06726115 -0.60401142 1.52584473]
[-0.29441806 0.91243357 -0.28563011 1.25014271]
[ 0.53091264 0.40395039 0.74436863 -1.4695856 ]
[ 0. 0. 0. 1. ]]
Robust ICP¶
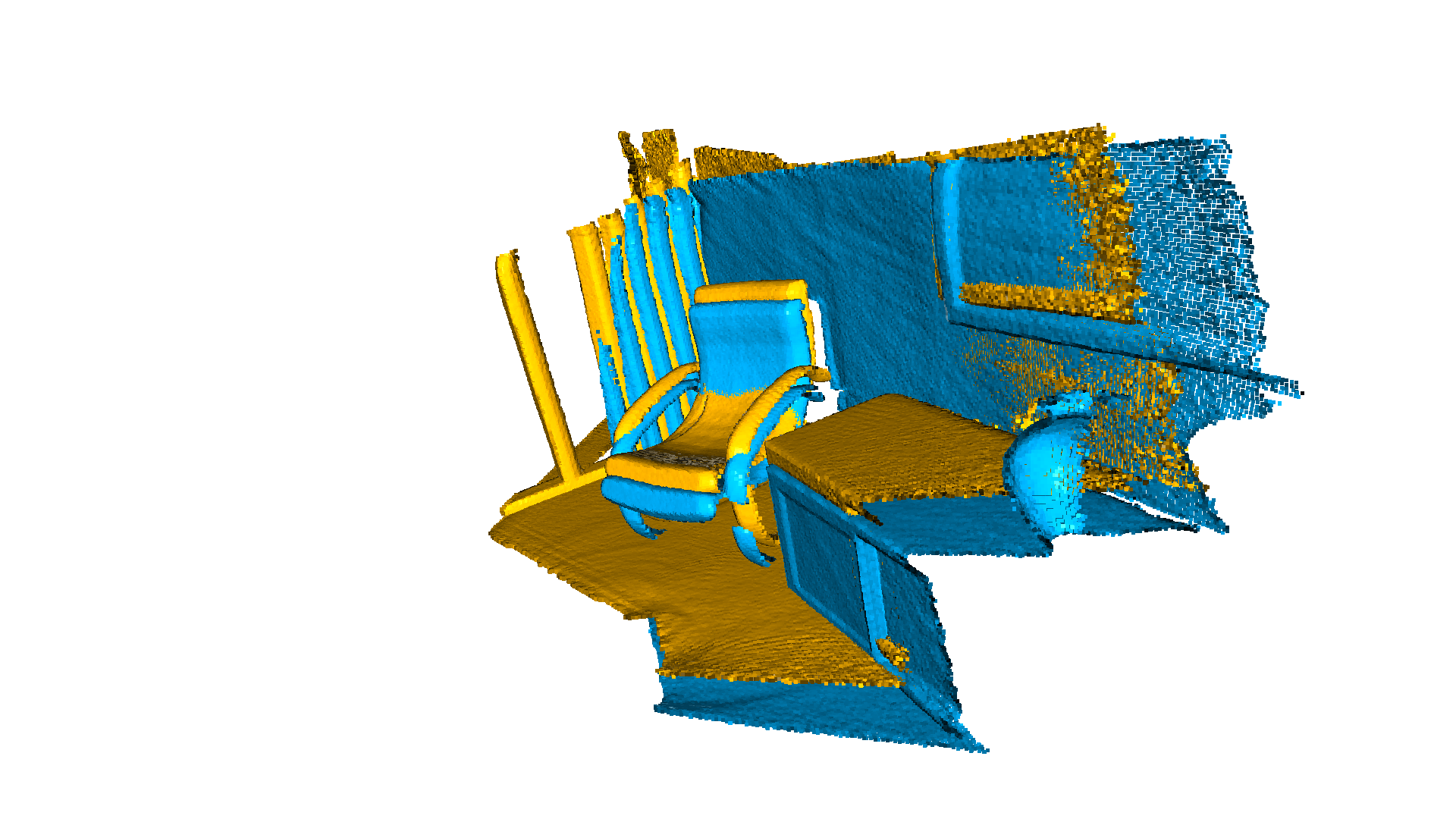
Using the same threshold=1.0 and a robust kernel, we can properly register the two point clouds:
[7]:
print("Robust point-to-plane ICP, threshold={}:".format(threshold))
loss = o3d.pipelines.registration.TukeyLoss(k=sigma)
print("Using robust loss:", loss)
p2l = o3d.pipelines.registration.TransformationEstimationPointToPlane(loss)
reg_p2l = o3d.pipelines.registration.registration_icp(source_noisy, target,
threshold, trans_init,
p2l)
print(reg_p2l)
print("Transformation is:")
print(reg_p2l.transformation)
draw_registration_result(source, target, reg_p2l.transformation)
Robust point-to-plane ICP, threshold=1.0:
Using robust loss: RobustKernel::TukeyLoss with k=0.100000
RegistrationResult with fitness=9.382956e-01, inlier_rmse=3.361359e-01, and correspondence_set size of 186566
Access transformation to get result.
Transformation is:
[[ 0.83322892 0.03996232 -0.55172363 0.60201765]
[-0.18693775 0.95943964 -0.21261804 0.91389023]
[ 0.519921 0.27948808 0.80677977 -1.51330924]
[ 0. 0. 0. 1. ]]
Note:
For this example we use the TukeyLoss, available in open3d.pipelines.registration.TukeyLoss. For the parameter k we set it to match the std deviation of the noise model k=σ. The parameter k used in the Robust Kernels it’s usually pick to match the standard deviation of the noise model of the input data. In this sense, k, is the discriminator between inlier/outlier. Altough this is not always trivial to define in real world data, for synthetic one, it’s
easy to fix in order to illustrate the benefits of the robust kernels.